Oulun Ammattikorkeakoulussa on tehty kevään 2020 aikana hyvinkin erilaisia robottikokeiluita. Yhteistyöyritysten toimiala oli laidasta laitaan, sillä mukana olivat jäkälään erikoistunut Polarmoss, hävikkiruokaa hyödyntävä Ciiyou sekä LED-valaisimia valmistava Greenled. Kokeilut olivat hyvin erilaisia keskenään, joten jokainen kokeilu vaati oman suunnittelunsa. Kaikissa oli kuitenkin tavoitteena helpottaa ihmisen fyysistä työtä tai jopa vapauttaa hänet tuottavampaan työhön yksinkertaisesta työvaiheesta. Jokaisella yrityksellä on ollut kiinnostusta robotiikkaan, ja sen käyttöönotto tulevaisuudessa nähdään liki välttämättömyytenä.
Roboteille suunnitellut tehtävät määräytyivät yrityksen toiminnan mukaisesti: jäkäläsäkkien siirtely Polarmossilla, smoothiepikareiden täyttö Ciiyoulla sekä linssien asennus ja ruuvaus Greenledillä. Jokaisessa kokeilussa oli omat haasteensa, mutta robotti saatiin suorittamaan asetetut minimivaatimukset. Valitettavasti koronavirus esti kokeiluiden tekemisen oikeasti paikan päällä, joten oikeat tulokset jäävät hieman arvailujen ja laskujen varaan. Nyt kokeilut tehtiin Proof-of-Conceptina, eli prototyypin avulla todennettiin tuotantomenetelmän toimivuutta koulun laboratoriotiloissa ja robotin työkierto videoitiin yritykselle.
Robottisolu palvelemaan yrityksen tarpeita
Kokeiluihin suunniteltiin ja rakennettiin robottisolu. Robottisolun kokonaisuuteen kuului robotin lisäksi tarttujat ja työvaiheen vaatimat oheislaitteet. Polarmossilla jatkokäsiteltiin jäkälää ja robottisolun avulla korvattiin osa ihmisen tekemästä raskaasta työstä. Tässä tapauksessa solun oheislaitteisto koostui vain yksinkertaisista mekaanisista osista, kuten paineilmasylintereistä ja ohjauskiskoista.
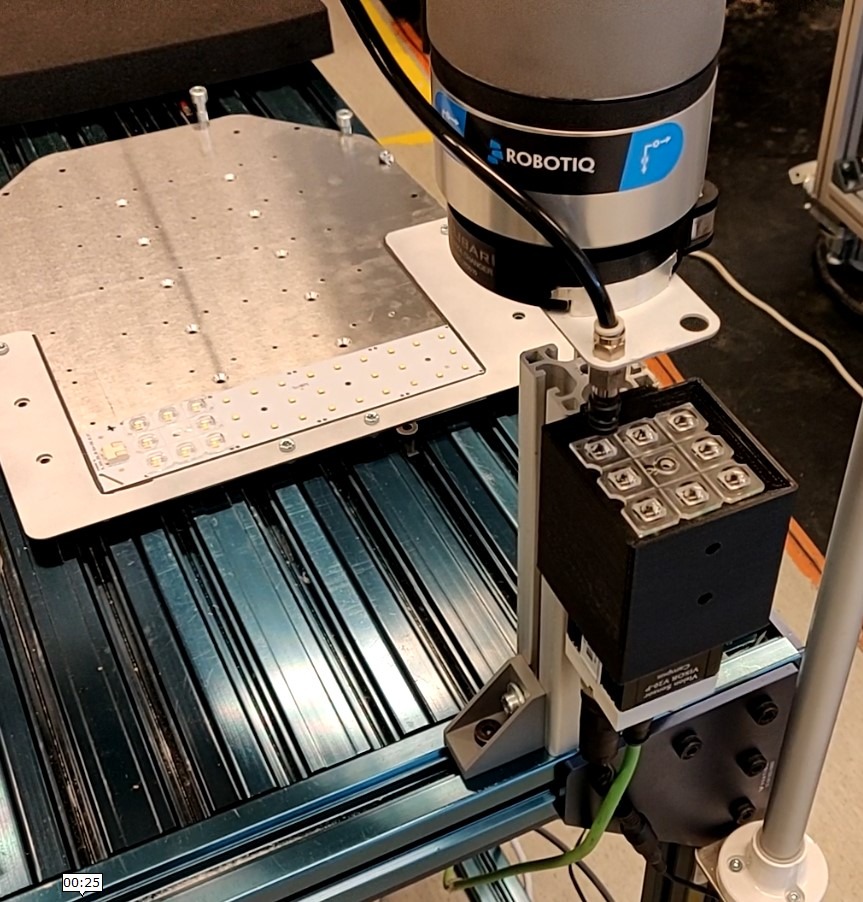
Greenledin kokeilun vaatima laitteisto oli jo hieman monimutkaisempi. Linssit poimittiin kuljetusalustaltaan alipaineella ja niiden asento tarkistettiin konenäön avulla, jotta ne saatiin robotilla asennettua oikeaan asentoon LED-kiskolle. Greenled on aikaisemmin ollut mukana OAMK:n POTKUA-hankkeessa ja saanut sitä kautta niin paljon hyötyä lean-filosofian saralla, että yritys päätti lahjoittaa kaksi automaattiruuvainta robottikäyttöä varten. Niiden ruuvit eivät kuitenkaan suoraan sopineet linssin ruuvausta varten, joten yritykselle näytettiin vain, miten ruuvaus yleisesti sujuu robotilta – ja sujuihan se! Haaveissa olisi vielä päästä kokeilemaan robottia tuotantolinjan kyljessä, jotta robotti nähtäisiin tositoimissa.
Usean työvaiheen yhdistäminen
https://youtu.be/W_dr2NnSOWg
Teknisesti haastavin ja mielenkiintoisin robottikokeilu oli Ciiyoun smoothientäyttö eli ”SmoothBot”. Haasteita aiheutti pikareiden poimiminen yksitellen, sillä ne tulevat sisäkkäin torneissa. Suunnittelua helpotti huomattavasti internetistä löytynyt kupinerottelija, jonka oli tehnyt nimimerkki ThatRobotGuy. Tätä ajatusta hieman jatkojalostettiin ja yksinkertaistettiin vastaamaan robottisolun tarpeita. Siinä askelmoottori liikuttaa erottelijaa kammen avulla siten, että pikaritornista tipahtaa yksi pikari kerrallaan alla olevaan tarttujaan. Askelmoottoria ohjaa uStepper-askelmoottoriohjain, joka keskustelee robotin kanssa ja johon on kytketty raja-anturi erottelijan sijainnin varmistamiseksi. Erottelijan toimintaa voi tarkkailla alla olevasta videosta.
Pikarin kantta varten suunniteltiin painin, joka painaa kannen tasaisesti pikariin kiinni. Kansi poimitaan mukaan Schmaltzin alipainekehittimen avulla, joka ei vaadi erillistä paineilmaa. Edullisempi ratkaisu olisi käyttää perinteistä paineilmatoimista ejektoria, mutta näin elintarvikekäytössä alipainekehitin on hygieenisempi puhtaamman ilman ansiosta. Itse smoothien annosteluun on useita eri tapoja: painovoimaa hyödyntävä hana, kauha tai pumppu. Hanassa voidaan hyödyntää määrän tarkkailussa aikaa tai kapasitiivista anturia, joka tunnistaa nestepinnan tason kupin läpi. Pumpussa voidaan edellä mainittujen lisäksi hyödyntää kierroslukumäärää. Meidän käyttöömme valikoitui peristalttinen pumppu sen hygieenisyyden vuoksi. Siirrettävä aine on kosketuksissa vain käytettävän letkun kanssa, joten pumppukaan ei sotkeudu tai vaadi pesua. Pikarin täyttöä vahdittiin kapasitiivisella anturilla, joka tarkkaili nestepinnan tasoa.
Greenledin tuotantopäällikkö Reima Ollila oli erittäin innostunut robotin toiminnasta, mutta koronarajoitusten takia emme saaneet mennä paikan päälle kokeilemaan solua. Polarmossin tapauksessa nähtiin ihan paikan päälläkin, mihin robotti kykenee. Siinä sovelluskohteessa kuitenkin todettiin, ettei robotti ainakaan sellaisenaan ole paras mahdollinen ja robotin käyttöönotto vaatisi isoja muutoksia koko tuotannon alkupäässä. Samalla vaivalla tuotanto olisi mahdollista uusia kokonaan niin, ettei robottia tarvitsisi ollenkaan.
Jokainen projekti kartuttaa osaamista
Kaikki projektit olivat hyvin mielenkiintoisia ja tarjosivat uudenlaisia haasteita. OAMK on nyt viiden vuoden aikana tehnyt noin 50 projektia robottien parissa, ja nämä olivat oiva lisä kartuttamaan osaamista. Yhteistyötä haluttaisiin jatkaa molemminpuolisesti tulevaisuudessakin, ja kaikilta löytyisi mielenkiintoisia aiheita esimerkiksi opinnäytetöiksi. Halu olisi päästä kokeilemaan Ciiyoun ja Greenledin robottisoluja oikeastikin tuotannossa, mutta koronan takia ei tiedetä, milloin se olisi mahdollista. Nyt kaivattaisiin uusia yhteistyöyrityksiä ja haasteita hankkeen loppuajalle.

Kirjoittaja Toni Autio työskentelee projektipäällikkönä Oulun ammattikorkeakoulussa Roboreel- ja TEHOJA-hankkeissa.







Ei kommentteja